|
| 网站首页 新闻动态 行业资讯 润(RUN)机器人 案例展示 联系我们 |
| 详细信息 | 位置: 首页 >> 行业资讯 |
触觉自感知柔性机械手-基于触觉自感知的物体形状和物体刚度辨识 |
| 编辑:润(RUN)机器人 来源:CAAI认知系统与信息处理专委会 时间:2024/1/8 |
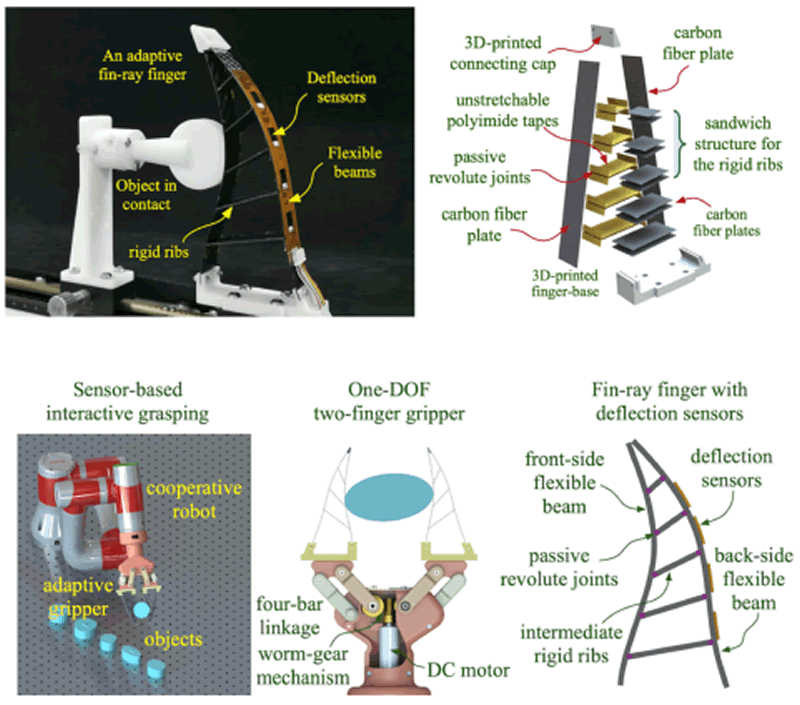
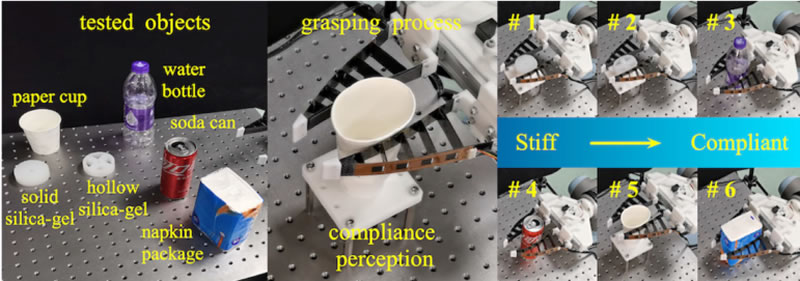
基于Fin-ray结构的柔性机械手由于其对不同形状具有极强的适应性,能够实现稳定可靠的抓取效果,得到了广泛的应用。然而,由于这类柔性机械手本身的被动顺应特性,抓取物体时会产生较大结构变形,要精准高效地实现手指与物体接触过程的变形计算分析和接触状态感知十分具有挑战性。针对这一类Fin-ray自适应柔性机械手,该工作提出了一种基于模型的触觉自感知、物体辨识以及交互操作方法。 基于刚度分解理论,提出单元离散等效建模方法,实现了柔性自适应机械手接触变形高效计算。同时,创新的将柔性弯曲变形传感器集成于手指背面,通过对手指背面局部变形的测量,巧妙地实现对于手指与物体接触状态(接触力与接触位置)的间接感知。基于所建立的接触感知模型,进一步提出了基于触觉自感知的物体形状和物体刚度辨识方法,并实现了基于力觉反馈的柔性自适应机械手交互操作。该工作为柔性自适应机械手的变形计算分析和接触状态感知提供了高效的解决方案。
集成弯曲变形传感器的Fin-Ray柔性自适应机械手
基于触觉自感知的物体软硬程度辨识 |
| 【声明:转载此文出于传递更多信息之目的,并不意味着赞同其观点或证实其描述,文章内容仅供参考,如有侵权,请联系删除。】 |
| 推荐信息 |
|
增强机器人抗恶劣环境能力,提高机器人对高度复杂地形的适应性与通过性;提高机器人载荷功能及模块化水平;提升机器人控制及智能化水平
探索大模型具身智能,支持智能感知认知决策;多个细分领域结合专业数据训练细分领域模型;大模型训练部署平台与向量数据库等基础配套设施建设
在数据安全方面,标注并审核安全与合规相关的微调数据,优化预训练数据质量;在模型安全方面采用机器审核与人工审核结合的模式进行审核
优势在逻辑推理,幻觉感知等方面有高的精度,配套生态丰富,可以支持行业模型应用;不足在多语言能力,支持的序列长度,推理速度,显存占用等方面仍有进步空间
在金融领域中,部分开源大模型已经应用于智能客服,智能运营,智能办公等场景;在法律领域中,应用开源大模型提供全流程智能辅助办案应用
在数据治理中,开源人工智能大模型关注数据隐私与数据安全质量;在模型治理中,应注重开源协议使用与模型伦理道德问题
open-core 商业软件模式是指核心代码开源,但是部分功能代码是闭源,最终形成了闭源 的代码软件进行售卖,专业服务模式由传统商业软件的以“产品”为卖点转向以“服务”为卖点
模型框架开源是人工智能大模型开源成熟度的第一级别;模型代码开源是人工智能大模型开源成熟度的第二级别;模型参数开源是人工智能大模型开源成熟度的第三级别
|
案例展示 |
|
格菲酒店(大兴区五福堂地铁站中科电商谷店)提供智能机器人送取物服务 |
|
秋果酒店(会展中心店)使用智能机器人「润」做服务员 |
| 最新动态 |
| 公司总部:北京云迹科技股份有限公司 电话:19863338289 联系人:郭先生 鲁ICP备18039973号-4 |