|
| 网站首页 新闻动态 行业资讯 润(RUN)机器人 案例展示 联系我们 |
| 详细信息 | 位置: 首页 >> 行业资讯 |
三维具身图文大模型系统指导机器人操作各类家电家具 |
| 编辑:润(RUN)机器人 来源:CAAI认知系统与信息处理专委会 时间:2024/1/12 |
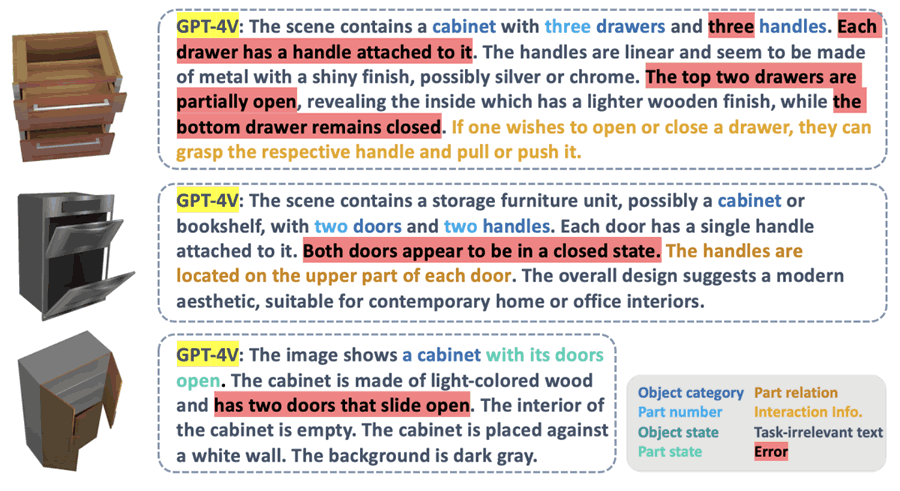
近日,PaLM-E 和 GPT-4V 带动了图文大模型在机器人任务规划中的应用,视觉语言引导下的泛化机器人操控成为了热门研究领域。 以往的常见方法是建立一个两层的系统,上层的图文大模型做规划和技能调度,下层的操控技能策略模型负责物理地执行动作。但当机器人在家务活中面对各种各样从未见过并且需要多步操作的家用电器时,现有方法中的上下两层都将束手无策。 以目前最先进的图文大模型 GPT-4V 为例,虽然它可以对单张图片进行文字描述,但涉及可操作零部件检测、计数、定位及状态估计时,它仍然错误百出。图二中的红色高亮部分是 GPT-4V 在描述抽屉柜、烤箱和立柜的图片时出现的各种错误。基于错误的描述,机器人再进行技能调度,显然不太可靠。
下层的操控技能策略模型负责在各种各样的实际情况中执行上层图文大模型给出的任务。现有的研究成果大部分是基于规则生硬地对一些已知物体的抓取点位和操作方式进行了编码,无法泛应对没见过的新物体类别。而基于端到端的操作模型(如 RT-1,RT-2 等)只使用了 RGB 模态,缺乏对距离的准确感知,对新环境中如高度等变化的泛化性较差。 受王鹤教授团队之前的 CVPR Highlight 工作 GAPartNet [1] 启迪,研究团队将重点放在了各种类别的家用电器中的通用零部件(GAPart)之上。虽然家用电器千变万化,但总有几样零件不可或缺,每个家电和这些通用的零件之间存在相似的几何和交互模式。 由此,研究团队在 GAPartNet [1] 这篇论文中引入了 GAPart 这一概念。GAPart 指可泛化可交互的零部件。GAPart 出现在不同类别的铰接物体上,例如,在保险箱,衣柜,冰箱中都能找到铰接门这种零件。如图 3,GAPartNet [1] 在各类物体上标注了 GAPart 的语义和位姿。 在之前研究的基础上,研究团队创造性地将基于三维视觉的 GAPart 引入了机器人的物体操控系统 SAGE 。SAGE 将通过可泛化的三维零件检测 (part detection),精确的位姿估计 (pose estimation) 为 VLM 和 LLM 提供信息。新方法在决策层解决了二维图文模型精细计算和推理能力不足的问题;在执行层,新方法通过基于 GAPart 位姿的鲁棒物理操作 API 实现了对各个零件的泛化性操作。 SAGE 构成了首个三维具身图文大模型系统,为机器人从感知、物理交互再到反馈的全链路提供了新思路,为机器人能够智能、通用地操控家具家电等复杂物体探寻了一条可行的道路。
|
| 【声明:转载此文出于传递更多信息之目的,并不意味着赞同其观点或证实其描述,文章内容仅供参考,如有侵权,请联系删除。】 |
| 推荐信息 |
|
AI将在机器人和自动化领域迈出新的发展步伐;机器人软件的发展将实现更多的共享和重复使用;物流将是机器人的一个重点领域
平台提供130亿参数通用大模型,130亿参数代码专用大模型,130亿参数 SQL 专用大模型以及130亿参数10K 上下文专用大模型,实现了200+个大型模型应用的开发
AI Agents 在机器人领域的应用也十分显著,智能机器人能够感知环境,理解语音指令,执行任务,并与人类进行交互,AI Agents 在不同领域的广泛应用已经在改变我们的日常生活
通过内部刚性机构实现柔性折纸驱动单元高精度,高承载多自由度运动,气动折纸与绳驱动并联机构构成一对拮抗驱动系统,使整个系统的运动与刚度同步可控
创新的将柔性弯曲变形传感器集成于手指背面,通过对手指背面局部变形的测量,巧妙地实现对于手指与物体接触状态(接触力与接触位置)的间接感知
增强机器人抗恶劣环境能力,提高机器人对高度复杂地形的适应性与通过性;提高机器人载荷功能及模块化水平;提升机器人控制及智能化水平
探索大模型具身智能,支持智能感知认知决策;多个细分领域结合专业数据训练细分领域模型;大模型训练部署平台与向量数据库等基础配套设施建设
在数据安全方面,标注并审核安全与合规相关的微调数据,优化预训练数据质量;在模型安全方面采用机器审核与人工审核结合的模式进行审核
|
案例展示 |
|
格菲酒店(大兴区五福堂地铁站中科电商谷店)提供智能机器人送取物服务 |
|
秋果酒店(会展中心店)使用智能机器人「润」做服务员 |
| 最新动态 |
| 公司总部:北京云迹科技股份有限公司 电话:19863338289 联系人:郭先生 鲁ICP备18039973号-4 |