|
全方位轮的组成是在轮毂的外缘上设置有可绕自己的轴旋转的辊子,且均匀 分布于轮毂周围,这些辊子轴线和轮毂轴线的夹角为90°。运动时轮毂是驱动机 构,辊子是从动机构,因此主动轮由车轮轮毂与边沿辊子组成,从动轮为车轮辊子, 主动轮、从动轮与地面接触点均为辊子与地面的接触点。相对于普通轮子,全向轮 周围的小轮子为它增加了一个自由度,使得全向轮具有更好的灵活性
全向轮的轮毂和和大轮轴使用铝合金材料,刚度和强度都较好,小轮轴使用普 通碳钢,因为整个轮子的最大应力处正好出现在小轮轴上,因此需要更高的强度。 小轮使用橡胶材料,摩擦系数比较大,能给机器人提供较好的抓地力和加速性能。
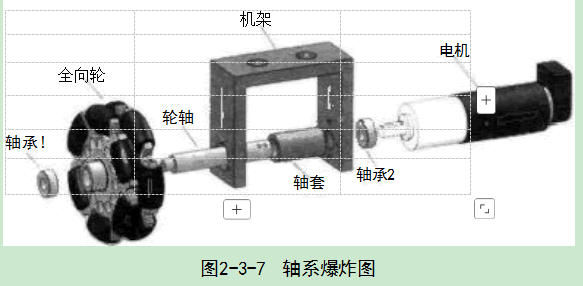
驱动轮系为电机与全向轮之间连接的部分,它的作用是将电机的输出扭矩传 递到驱动轮上。驱动轮系的设计满足如下要求:
(1)尺寸符合机器人的要求。
(2)结构简单、合理,拆装方便。
(3)强度及刚度符合要求。
(4)保护电机的输出轴,避免连接驱动轮带来的载荷直接作用到电机轴上。
(5)扭矩的有效传递。
考虑以上要求,做出的设计如图2-3-7所示。
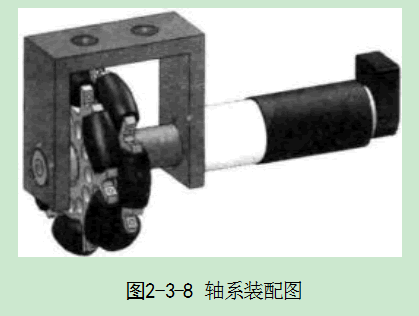
轴系装配图如图2-3-8所示。
架和轴承座一体的设计方案,选用现成的方形 铝管作为原材料,而不是采用一大块铝块进行加工,减少了切削量,减少了材料的 浪费。中间轴承孔采用一刀加工,充分保证两个空的同轴度。另外,采用双轴承从 两边支撑的方式,避免了悬臂效应,保证机器人的重量能垂直地作用在轮子上。由 于现成的方形铝管宽度与轮子宽度有较大差别,中间采用了一个轴套,避免轮子的 滑动。在设计过程中,为了保证电机轴与轮轴之间的扭矩传递,特别在轮轴上采用 了 D 型孔设计,可以与电机轴无间隙的配合。虽然D 形盲孔的加工需要使用电火 花工艺,成本较高。但作为机器人的关键部位还是值得的。
|
