|
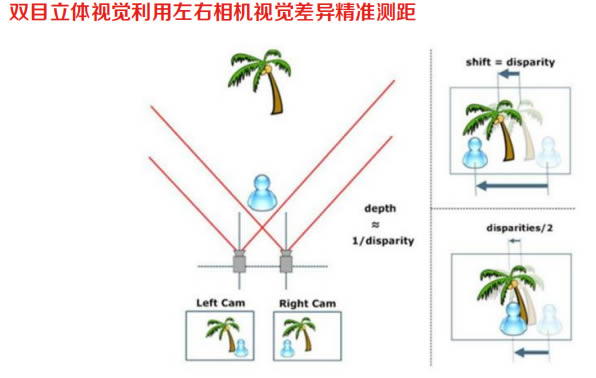
双目/多目立体视觉的基本原理是从两个(或多个)视点观察同一景物,以获取在不同视角下的感
知图象,通过三角测量原理计算图像像素间的位置偏差(即视差)来获取景物的三维信息,这一
过程与人类通过左右双眼获得立体感知过程类似。双目/多目视觉测距的过程主要分为摄像机标定、
立体校正、立体匹配和三维重建共四个环节,其中摄像机标定和立体校正理论已经比较成熟,而
立体匹配作为关键的视差求取步骤,立体匹配算法的精度对测量结果的准确度影响极大,目前算
法仍比较复杂,还在持续研究改进。
双目立体视觉无需对外主动投射光源;完全依靠拍摄的两张图片(彩色 RGB或者灰度图)来计算
深度,因此测距设备仅需两台参数一致的摄像机,对相机硬件要求低、成本低。劣势是双目视觉
对环境光照非常敏感,依赖环境中的自然光线采集图像,鲁棒性差;并且最大的问题是立体匹配
算法复杂,算法精度对结果准确度影响大。
|
