|
机器人的底盘设计主要考虑底盘全向轮的布局、底盘大小和底盘悬挂的问 题。移动机器人采用四全向轮布局的方式,轮之前的夹角为 90°。接下来要确定底盘的大小,因为底盘大小是影响机器人稳定性的另一重要 因素。如果机器人的底盘太小,而机器人的重心又较高,那么在机器人加减速的过 程中很容易倾倒。确定底盘大小的基本要求是保证机器人在加减速的过程中不会 倾倒。
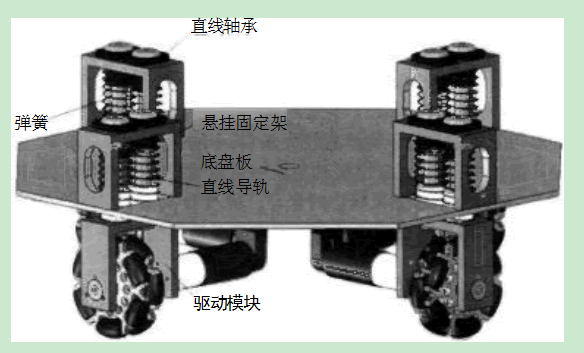
由于机器人采用了四个全向轮的底盘,在平面上很难保证四个点同时着地。 如果四个轮子不能同时着地或者接触不好的话,就很容易出现轮子空转或打滑的 现象,影响机器人的运动。因此,对于四轮机器人,悬挂设计是不可或缺的一部分。 在全方位移动机器人的设计中,主要考虑机器人在室内移动时要保证四轮同时着 地,而且,当处在不很平坦的地面时,轮子也能很好地与地面接触。在这种要求下, 如果采用类似汽车上的软悬挂的话,在机器人运行时就很容易出现前后左右晃动 的现象。因此,在平顺运行时,机器人的底盘与悬挂最好能保持硬接触。在悬挂结 构上,为方便起见.采用了直上直下的悬挂方式,如图2-3-9所示。
悬挂设计最重要的是弹簧的选择,简化模型如
图2 - 3 - 10所示。
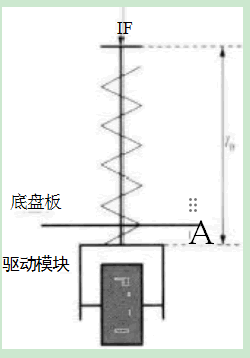
在四个轮子平均着地的情况下,应当保证底盘板与驱动模块机架接触。此时
F=mg/8=68N (2-3-1)
设计要求△l=0.02m.
因 此 ,
k=F/△l=3437 N/m (2-3-2)
弹簧原长设计为14cm 。 查国标选得弹簧的外径为20 mm,丝径为2mm,螺距为5mm 的合适 要求 。
结构上,为稳妥起见,每个轮上采用两个弹簧, 弹簧的 一端顶在悬挂座的下侧,另 一端顶在驱动模 块上,这样,如果某个轮子上的压力减小或者悬空
的话,弹簧伸长,使得该轮子能充分着地。底盘板在刚度要求许可的情况下,选用 了5cm 厚的6061铝合金板材。
|
